Pablo Martínez Padín
Director Comercial
Vamos a tratar en este articulo lo que desde Keyland SdG entendemos por robótica móvil para un entorno industrial. Nos centraremos en la planta, las líneas de producción, dejando la parte de almacén para otro artículo específico sobre carretillas autónomas.
¿Por qué la robótica móvil en un entorno industrial?
En la actualidad son muchas las empresas que tienen carretillas moviéndose por toda la planta. Como todos sabemos, y así las estadísticas nos lo confirman, son la principal causa de accidente en una planta industrial (atropellos, choques, vuelcos, etc.). Por esta razón, la política de muchas empresas va orientada a la eliminación de las carretillas conducidas por operarios.
Fruto de esta necesidad, principalmente, y además incluyendo un posible ahorro de costes laborales, la mayoría de las empresas están evaluando la opción de migrar dichas carretillas manuales a “vehículos de movimiento de carga autónomos”. Genéricamente a estos “vehículos” se los conoce como AGVs o AMRs.
Consulta aquí nuestro evento-demo: interoperabilidad en robótica móvil.
¿Qué son los AGVs y AMRs?
Lo común a ambos vehículos es que son autónomos, es decir, no son conducidos por ninguna persona. La principal diferencia entre ambos es cómo se orientan para ir de un punto a otro de una planta industrial, lo que se denomina “navegación”.
El AGV (Automatic Guided Vehicle) utiliza unas “referencias” que físicamente deben estar en el suelo, mientras que los AMR (Autonomous Mobile Robot) utilizan lo que se denomina una navegación “natural”, es decir, son capaces de analizar el entorno y tomar decisiones de por donde deben circular.
Seguidamente, no vamos a profundizar en los tipos de “navegación” que tienen estos vehículos, pero sí vamos a dar una breve pincelada de las distintas opciones.
¿Cuáles son los distintos tipos de navegación?
Como hemos comentado anteriormente, la diferencia entre los AGV y los AMR está en cómo navegan de un punto a otro de la planta.
Los AGV deben tener marcadas ya unas referencias, y lo que hacen es seguir esas referencias de un punto a otro sin salirse de esa trayectoria. Aquí se utilizan soluciones de banda magnética o códigos QR. Esto implica la necesidad de algún tipo de instalación en la planta.
Los AMR como hemos dicho, utilizan la navegación natural, es decir, analizan el entorno y toman decisiones en función de él. Existen soluciones basadas en escáneres 2D (VSLAM) y las más avanzadas ya utilizan sistemas 3D e incluso cámaras de visión junto con Inteligencia Artificial que les permiten tener una mayor información del entorno y su variabilidad.
Ya hemos avanzado que el objeto de este artículo no es conocer cómo son los distintos tipos de navegación, sino centrarnos en cómo nos puede ayudar la robótica móvil a mejorar nuestros procesos de transporte de materiales dentro de la planta industrial.
En este punto es importante resaltar que AGV y AMR son tecnologías diferentes, pero no prevalece una sobre la otra. Hay entornos en los que puede encajar mejor una solución con AGV por espacio, costes, simplicidad de instalación, y en otros aplica mucho mejor una solución AMR debido al estado del suelo, necesidad de buscar rutas alternativas, etc.
En Keyland SdG analizamos cada caso y construimos la propuesta en función de lo que entendemos es más beneficioso para nuestro cliente.
¿Cómo puede ayudarnos la robótica móvil a mejorar el proceso de transporte en planta?
Ahora vamos a centrarnos en posibles soluciones, al margen de que la tecnología que seleccionemos sea AGV o AMR.
El primer análisis parte de lo que vamos a transportar. Por lo general y con nuestra experiencia en plantas industriales suelen ser tres tipos de elementos:
- Pallets
- Carros
- Contenedores
Con esto cubrimos el 90% de las opciones, teniendo en cuenta que tanto los carros como los contenedores pueden tener distintos tamaños y formas. En cuanto a los pallets, generalmente solo hay opción de europeo o americano.
Una vez identificado lo que tenemos que transportar, es cuando decidimos cuál es el más adecuado dentro de la gama de productos:
Pallets:
Aquí principalmente existen 2 opciones, utilizar carretillas autónomas o plataformas. En el primer caso, se hace lo mismo que con una carretilla manual, pero sin conductor. En el caso de plataformas, el pallet no puede estar al nivel del suelo, debe estar elevado para que la plataforma se meta debajo del pallet y lo levante sobre él. Este inconveniente se compensa con un menor coste del equipo en sí, y debe analizarse con el cliente.
Carros:
Aquí hay una mayor casuística, pero en general los carros son como estanterías con 4 ruedas y el robot móvil se mete debajo, se “engancha “ al carro y hace de motor, aunque el carro se mueve sobre sus propias ruedas, a diferencia de un robot móvil tipo plataforma. En otros casos, en lugar de meterse debajo, simplemente lo remolca como un coche con roulotte. Las dimensiones del carro y los pesos son los que definirán el tipo de robot móvil a elegir.
Contenedores:
Aquí de nuevo tenemos mucha variabilidad en cuanto a formas, pesos, etc., pero por lo general lo que más aplica son robots móviles tipo plataforma, que se meten debajo, elevan el contenedor y se lo llevan, salvo que ese contenedor esté colocado sobre un sistema con ruedas, en cuyo caso también se puede utilizar un robot móvil de arrastre.
El primer análisis que se realiza en un proyecto de robótica móvil es cuál es el vehículo que mejor se adapta a las necesidades del cliente.
Consideraciones adicionales
En aras de no extendernos demasiado, simplemente comentaremos brevemente alguno de los parámetros que son necesarios para evaluar y dimensionar adecuadamente un proyecto de robótica móvil:
Seguridad
Ni que decir tiene que cualquier proyecto de robótica móvil debe garantizar la completa seguridad de todos los trabajadores de la planta. Para ello, todos los fabricantes disponen de soluciones que cubren todas las posibles opciones de accidentes mediante escáneres de seguridad, fotocélulas, sensores, etc.
Tiempo de ciclo
No cabe duda de que es uno de los parámetros más importantes a la hora de tomar la decisión de realizar un proyecto de esta índole. No se deben penalizar los tiempos existentes.
Puntos de carga y descarga
Estos puntos tienen que estar perfectamente definidos y la colocación de los carros, contenedores o pallets tiene que ser muy exacta para que no haya problemas a la hora de que el robot móvil coja o deje adecuadamente la carga. Para ello se suele complementar con sensores que permiten saber si todo es correcto.
Carga de baterías
La autonomía de los robots móviles es también un parámetro básico a tener en cuenta. Como es lógico, cada cierto número de horas de trabajo debe ir a un punto de carga, lo que significa que durante ese tiempo no hay transporte. Aquí analizamos si estas cargas pueden realizarse en tiempos muertos (paradas, descansos, averías, etc.) o si es necesario incorporar más robots móviles de reserva (cuando el número de vehículos es elevado).
Gestor de flota
Es el cerebro de todo el proyecto. Cuando se dispone de varios robots móviles, es el que analiza la posición de cada robot en cada momento y asigna las misiones dependiendo de su posición, carga de trabajo, estado de batería, etc.
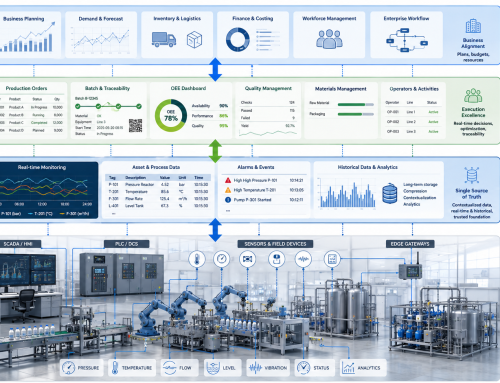
Integración con los sistemas de planta
En la mayoría de los casos, se requiere de un middleware que conecte el gestor de flota con el sistema ERP de la compañía (SAP, NAV, ORACLE, etc.).
Estado general de la planta
Otro condicionante importante es el estado general de la planta, en concreto del suelo de la planta. Baches, suciedad, humedad, pendientes, puertas automáticas, ascensores, etc., hacen que un proyecto pueda ser totalmente inviable y por eso deben analizarse minuciosamente.
Factor humano
La “culturización” del personal de planta para aprender a convivir con los robots móviles es también decisiva. Cada uno debe tener su espacio y deben evitarse interferencias que penalicen el tiempo de ciclo.
En Keyland SdG, analizamos en detalle cada uno de estos parámetros para garantizar una correcta viabilidad del proyecto. Dado que tenemos un alto conocimiento de integraciones de software, podemos gestionar por completo todo el proceso integrando la parte ERP o MES dentro del propio proyecto.