Agustín Sánchez Martín
Gerente de Robótica
La Robótica Móvil engloba un conjunto de tecnologías que se integran en una gran diversidad de sectores y servicios, que posibilita nuevos modelos de negocio, mejorando la productividad, la eficiencia, la sostenibilidad, y haciendo que el trabajo sea más seguro en una amplia gama de industrias.
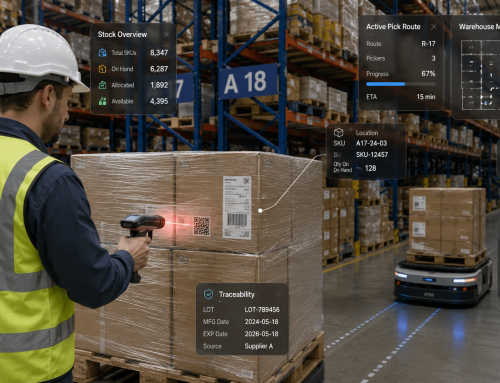
Se ha definido la Robótica Móvil como el conjunto de sistemas con tecnologías robóticas, destinados sobre todo al transporte de todo tipo de cargas de forma autónoma, utilizados, sobre todo, en procesos intralogísticos, esto es, en la gestión de los flujos de materiales (materias primas, WIP, producto terminado, gestión entre la producción y los almacenes…) y los flujos de información (gestión integrada con sistemas ERP, MES, MOM, SGA, GMAO… y una trazabilidad completa).
La Robótica Móvil en entornos industriales destaca por ser flexible, fiable, escalable, adaptable a cada necesidad y ser colaborativa, es decir, que sus sistemas han sido diseñados y deben ser integrados para interactuar de forma segura y eficiente con las personas en un entorno compartido. Son sistemas totalmente seguros para los trabajadores y para el entorno de trabajo gracias a los sensores que integran, lo que les permite reconocer objetos o personas, y sortearlos sin colisionar con ellos.
Tecnologías utilizadas
Los rápidos avances en hardware y software permiten que los robots móviles autónomos (AMR – Autonomous Mobile Robots) puedan navegar y realizar funciones de forma autónoma, pudiendo desplazarse por fábricas, oficinas, pasillos o almacenes sin tener que seguir rutas fijas, evitando obstáculos y replanteando su ruta sobre la marcha y así interactuar, de forma segura, en un entorno incierto y cambiable.
La navegación autónoma en robots se basa en algoritmos de localización y mapeo simultáneos (SLAM – Simultaneous Localization and Mapping). Los algoritmos SLAM construyen un mapa de los alrededores del robot al mismo tiempo que determinan la posición del mismo dentro de ese mapa, en función de los datos recibidos de los sensores.
SLAM suele combinar datos de múltiples fuentes, incluidas la detección y medición de distancias por imágenes de luz (LiDAR – Light Imaging Detection and Ranging), radar, GPS, odometría (sensores de movimiento para estimar el cambio de la posición con respecto al tiempo) o, más recientemente, algoritmos VSLAM (SLAM Visual) que añaden datos de sistemas de visión 2D y 3D.
La seguridad de personas y bienes
Los robots móviles aportan ventajas a los empleados de múltiples sectores. Por ejemplo, los operarios de fábrica ya no tienen que llevar cargas pesadas, entrar en áreas peligrosas o caminar kilómetros para transportar materiales o productos terminados, sino que pueden centrarse en tareas de mayor valor.
Los trabajadores de logística también están más seguros: en los EEUU, por ejemplo, 614 trabajadores perdieron la vida en 2017, en incidentes relacionados con carretillas elevadoras. Además, se produjeron más de 7.000 lesiones no mortales que provocaron miles de días de ausencia del trabajo cada año.
Fuente: https://www.bls.gov/iif/oshwc/cfoi/forklifts-2017.htm
En España, según el análisis de mortalidad por accidente de trabajo (ATM) en España, entre 2017 y 2019, elaborado por el INSST:
- el mayor porcentaje de la mortalidad por factores individuales es la permanencia del trabajador dentro de una zona peligrosa (32,1%),
- el 12,7% de la mortalidad está relacionada con dispositivos de traslado, transporte y almacenamiento.
Sólo en el sector Industria, existe la siguiente estadística para ATM:
- 19,6% por choque, golpe o colisión contra un objeto en movimiento,
- 6,8% relacionado con carretillas elevadoras, carretillas motorizadas transportadoras, elevadoras, apiladoras, con conductor.
Fuente: Análisis de la mortalidad por accidente de trabajo en España. 2017-2019
Para evitar accidentes, existen diversas normas que garantizan la seguridad de las personas en torno a los robots móviles. Hay que tener en cuenta que estas normas cubren la responsabilidad del fabricante del robot y también la del integrador de los sistemas.
En el ámbito de la seguridad en el manejo de equipos de transporte de carga, la norma ISO 3691-4:2024 juega un papel fundamental. Se estableció en febrero de 2020 y ha sido revisada y actualizada en junio de 2023.
Es la principal norma internacional que establece los requisitos de seguridad y los medios para su verificación en vehículos guiados automatizados (AGV), plataformas móviles autónomas (AMR) o carretillas autónomas sin conductor y sus sistemas. El objetivo es poder garantizar la seguridad de los trabajadores y minimizar los riesgos de accidentes, así como contribuir para una intralogística más eficiente y segura.
Consulta aquí nuestro evento-demo de interoperabilidad en robótica móvil.
Principales requisitos de seguridad de la norma ISO 3691-4:2024
Esta norma específica los requisitos de seguridad y los medios para su verificación en vehículos autónomos sin conductor, tales como carretillas de manutención sin conductor (carretillas tal y como se definen en la Norma ISO 5053-1:2020) incluyendo “vehículo guiado automatizado”; “robot móvil autónomo”, “bots”, “carro guiado automatizado”, “remolcador de túnel”, “bajo carro”, etc.
Además, todos los vehículos deben tener el marcado CE y se debe realizar una evaluación de riesgos en todos los recorridos y para todas las situaciones. Es aplicable a todos los peligros, situaciones o eventos peligrosos significativos durante todas las fases del ciclo de vida.
Algunos de los requisitos más importantes incluyen:
- Señalización visible y clara para evitar accidentes,
- Inclusión de dispositivos de seguridad como protecciones para evitar el aplastamiento de los pies, sistemas de alarma acústica y sistemas de frenado de emergencia,
- Requisitos específicos para los controles manuales, sistemas de elevación, estabilidad y visibilidad,
- Capacitación de los operadores para manejar los equipos de manera segura,
- Entornos de operación preparados para eliminar peligros asociados,
- Modos automáticos que requieren la acción de los operadores para iniciar o habilitar dichas operaciones automáticas
- Modos manuales adicionales que permiten a los operadores operar el camión manualmente
- Un modo de mantenimiento que permite la operación manual de las funciones por razones de mantenimiento.
Algunos puntos clave:
- Dispositivos de protección: Los vehículos deben estar provistos de una función de parada de emergencia que cumpla con la norma ISO 13850.
- Sistema de frenado: deben estar diseñados para funcionar en caso de interrupción del suministro eléctrico y activarse automáticamente en caso de pérdida de control de la velocidad o la dirección. Además, los sistemas de frenado deben poder detener el vehículo dentro del rango operativo de detección de personal especificado por el fabricante (velocidad, tipo de suelo, pendiente, carga nominal…)
- Control de velocidad: se debe detectar el exceso de velocidad, iniciando una parada cuando la velocidad del vehículo supere la velocidad nominal especificada por el fabricante. También se debe controlar la velocidad para garantizar la estabilidad en todas las condiciones de funcionamiento y durante todos los movimientos de manipulación de carga y desplazamiento, incluso durante una parada de emergencia o de protección.
- Selección de los campos de detección: la selección o conmutación de los casos del sistema de detección de personas durante la navegación del vehículo en su entorno de trabajo final tiene que ser gestionada desde el sistema de seguridad. Al permitir esta selección se deberá supervisar de forma segura que la velocidad, dirección, sentido de la marcha, etc. están en consonancia con el caso conmutado.
- Carga automática de la batería: las conexiones de carga automática con una capacidad nominal superior a 60 VCC o 25 VCA deben estar diseñadas para evitar riesgos de descarga eléctrica derivados del contacto accidental con piezas activas de acuerdo con la norma IEC 61558-1. Un vehículo equipado con un sistema de carga automático está diseñado de tal manera que los contactos de carga accesibles sólo se activan cuando la carretilla está conectada al dispositivo de carga.
- Manejo de la carga: el vehículo debe estar diseñado de tal manera que la carga permanezca dentro de los límites de la posición determinada por el fabricante en cualquier modo operativo, incluso durante una parada de emergencia y durante la transferencia de la carga.
- Nivel de prestaciones (PL) para las diferentes funciones de seguridad (medidas de protección) basados en los peligros enumerados en la norma ISO 3691-4, que determina el nivel de prestaciones requerido, la identificación de partes de sistemas de mando relativas a la seguridad y la implementación de las funciones de seguridad.
- Por ejemplo, la función de seguridad del sistema de frenado para el riesgo de colisión con las personas tiene un mínimo PLr d.
- Medidas de seguridad del usuario de los sistemas como mantenimiento preventivo y revisiones periódicas de los sistemas, según las instrucciones del fabricante, incluyendo los dispositivos de seguridad,
Integración de sistemas y ciberseguridad
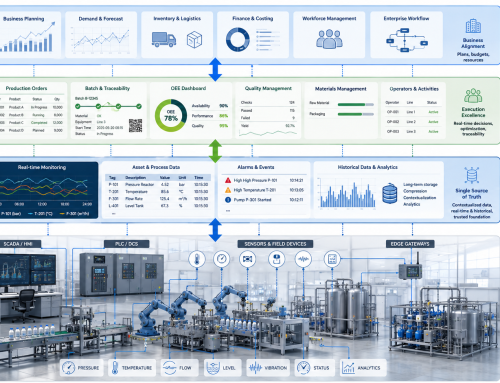
Los robots móviles deben integrarse sin problemas con otros sistemas existentes en la planta. No solo deben comunicarse entre sí, sino también con otras soluciones de robótica como por ejemplo cobots, con los gestores de recursos (ERP), de producción (MES/MOM), de mantenimiento (GMAO) o almacenes (SGA) u otras aplicaciones software industriales, para coordinar sus movimientos y optimizar la eficiencia en el desempeño de sus tareas. Y por supuesto, deben integrarse con los sistemas de seguridad de la fábrica como sistemas de vigilancia y alarmas, para una respuesta coordinada ante emergencias.
Además de proteger personas y bienes, la ciberseguridad es la práctica de proteger información, datos y sistemas frente a los ciberataques, que puedan comprometer la seguridad y el funcionamiento de los sistemas computarizados, para garantizar la integridad, confidencialidad y disponibilidad de la información.
Las amenazas de ciberseguridad en los robots móviles son un tema vital, ya que estos dispositivos están cada vez más integrados en entornos industriales. Para mitigar estas amenazas (acceso no autorizado, intercepción de comunicaciones, malware, ransomware, ataques de denegación de servicio (DoS), robo de datos…), es esencial implementar medidas de ciberseguridad robustas, como el cifrado de datos, la autenticación multi-factor y la actualización regular de software.
Para la ciberseguridad, la Directiva actualizada sobre Seguridad de las Redes y los Sistemas Informáticos (NIS 2) de la UE entró en vigor en enero de 2023. Los estados miembros tienen hasta octubre de 2024 para trasladarla a la legislación nacional.
La Directiva NIS2 propone seguir mejorando el trabajo iniciado en la Directiva NIS para crear un alto nivel común de ciberseguridad en toda la Unión Europea, imponiendo obligaciones a los estados miembros, y a las entidades públicas y privadas de sectores críticos.
- Amplía el ámbito de aplicación: más sectores, subsectores y tipos de entidades
- Las entidades en su ámbito han de gestionar sus riesgos de ciberseguridad, tomando medidas técnicas, operativas y organizativas.
- Afecta, en general, a medianas y grandes empresas de esos sectores.
- Fija plazos para que las entidades en su ámbito notifiquen incidentes significativos.
- Afecta a ciertas entidades con independencia de su tamaño.
- Endurece las sanciones en caso de incumplimiento.
- Clasifica las entidades en esenciales e importantes con distintos regímenes de supervisión y sanciones.
- Las entidades en su ámbito han de tener en cuenta los riesgos de su cadena de suministro TIC.
- Incluye nuevas formas para que las entidades afectadas se identifiquen y registren.
- Introduce la divulgación coordinada de vulnerabilidades para entidades afectadas.
Más información: INCIBE | INCIBE